|
I earned a master's in Robotics at Worcester Polytechnic Institute (WPI) in December 2023. While at it, I worked at Skydio and Humane as a computer vision intern. Previously, I was a part of Skylark Drones, solving computer vision problems associated with drone surveys. I was also the primary backend developer for Drone Mission Ops, the proprietary software for managing commercial drone operations. I obtained my bachelors in Electrical Engineering from VNIT(India) in 2018, where I actively engaged in projects as part of the robotics club, Ivlabs. I am interested in visual perception, deep learning & system software and am currently open to new opportunities. |

|
|
|

|
SLAM Engineer
Collaborate with the hardware team to address questions that influence SLAM, such as sensor specifications & placements for the VR headset. Develop algorithms for low-latency pose estimation, sensor fusion, calibration, optimization. Work with the embedded team to make the early-stage prototypes of the VR headset functional. |

|
Computer Vision Engineering Intern
Integrated hand gesture recognition feature using MediaPipe model into an android application. Interfaced this feature with the Speech service of the application to speak when the gesture is recognized. Animated a rigged 3D hand model using joint transformations to optimize the rendering of laser effects onto the palm region, resulting in improved visual realism & interactivity. Building a deep learning pipeline for temporal gesture recognition. |

|
Autonomy Engineer Intern: Computer Vision
Worked on enhancing localization accuracy of Skydio’s Visual Positioning System (VPS), enabling more precise drone positioning. Used a sequence of images with relative pose constraints to refine the optimization problem for reducing VIO drift. Utilized SymForce, a symbolic computation library for code generation and nonlinear optimization. Analyzed the performance on flight logs with sensible, intuitive metrics in the absence of ground truth data. |
|
|
Perception for drone surveys:
Developed an object detection algorithm for Ground Control Points (GCPs) in aerial drone images, combining traditional computer vision tools with a CNN inspired by the LeNet model which resulted in 94.6% accuracy(F-score) Achieved 86% accuracy in estimating crop count for a farm using machine learning techniques(SVM, CNNs) Drone mission planning & operations:Primary back-end developer & maintainer for the proprietary drone operations management application, Drone Mission Ops. Created multiple RESTful API endpoints with the best software development practises & secured them with unit tests. Optimized several API routes to achieve 40-80% reduction in latency using MongoDB. Integrated Celery for background processing of time-consuming tasks like drone mission creation, elevation profile generation for areas of interest, etc. Added support for registration & authentication workflows, conditional requests, push notifications, and pagination among others. |
|
|

|
Aman Jain, Milind Mahajan, Radha Saraf CVC(SAI), 2019 Springer To establish an accurate earth to orthomap correspondence for aerial images from UAVs, we proposed the design of a simple marker along with the pipeline for its detection |
|
project page Reconstructed a 3D scene from a set of images with different viewpoints using CV & DL methods, sfM and NeRF resp. |
|
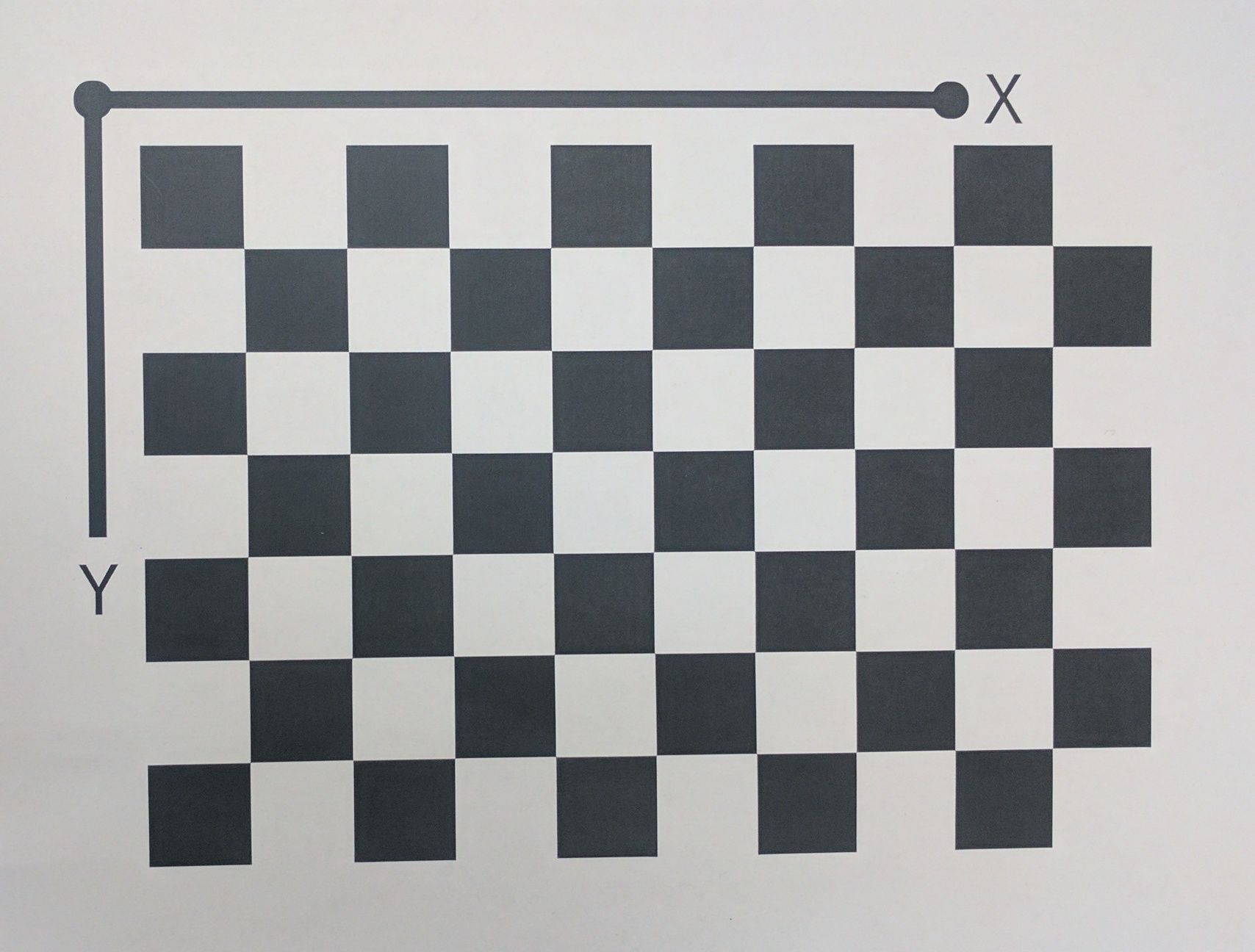
project page Implemented camera calibration method as presented by Zhengyou Zhang in his 1998 paper from Microsoft Used eigen decomposition for solving homogenous system of linear equations & MLE for optimization of calibration parameters The mean re-projection error post optimization was close to 0.5 pixels |
|
project page Used Delaunay triangulation and Thin plate splines based warping to swap two faces in a video. Blended the faces using Poisson blending |

|
project page Estimated homography between image pairs using feature correspondences. Used Adaptive non-maximal suppression for uniform features and RANSAC for removing the outliers among the feature matches. Also, trained HomographyNet, a CNN based supervised learning architecture for homography estimation using synthetically generated data. |
|
project video Carried out calibration for camera intrinsics of an autonomous mobile robot. Estimated pose of the robot using differential-RGB color-space, image processing tools, and the perspective-n-point algorithm from the OpenCV library. Accuracy was within +/-5 cm. |

|
project page Developed a simplified version of pb, which finds boundaries by examining texture and color discontinuities in addition to intensity discontinuities across multiple scales. Outperforms Canny and Sobel by suppressing the false positives produced by classical methods in textured regions. |
|
project page Implemented planning algorithms- BFS, DFS, Dijkstra’s, & A* on a grid world setup of configurable obstacle density. |

|
project page Implemented a Deep QLearning Network(DQN) to play Breakout for an averaging reward over 40 points in 100 episodes. |
|
poster Implemented Dueling DQN(DDQN), Asynchronous Advantage Actor Critic(A3C), Proximal Policy Optimization(PPO) on Super Mario Bros. environment |
|
Used ROS’ client-service, publisher-subscriber frameworks for PID control of robot manipulator end-effector pose. |
|
|
|
|
Matrices and Linear Algebra (MA 2071) Sensors, Circuits and Systems (ECE 2019) |
|
|
|
Supervised and mentored high school girls throughout a 2-week, math, day-camp that explored mathematical concepts in RSA Cryptography. |
|
|
|
As an undergrad senior, I taught linear algebra to sophomores as part of the mentorship program at Ivlabs. |
|
Source code and style cloned from Jon Barron's website |